
Controles para un dedo – Electric Image Universe
Si quieres aprender un poco más de ElectricImage Universe, Gustavo Muñoz desde Valencia España, nos trae un muy completo tutorial para controlar un dedo.
No te lo pierdas, y bueno a aprender…
Controles para un dedo – tutorial para ElectricImage Universe
Las técnicas empleadas aquí las he extraido fundamentalmente de los setups que Raf Anzovin ha ido desarrollando para Animation:Master, más en concreto del setup V.3, cuya funcionalidad estoy intentado emular con las IK’s y los Constraints de ElectricImage Universe Animator. Esto es un proceso siempre perfeccionable, y de hecho una de las razones que me mueven a publicarlo es buscar colaboración entre la base de usuarios interesados en el tema, para confeccionar entre todos un esqueleto eficiente que nos sirva para impulsar el trabajo con personajes en esta poderosa aplicación.
Comienzo por un detalle muy importante, las manos, que nos servirá para probar las herramientas.
El objetivo aquí es conseguir controlar todos los movimientos necesarios para animar convenientemente un dedo, pero con el mínimo de elementos posibles para facilitar la animación, idealmente con un sólo hueso.
Utilizaremos como objeto a deformar una «UberNurb» sencilla, pero con la estructura y las divisiones mínimas necesarias para que se deforme correctamente.
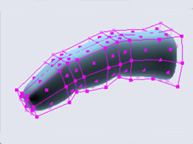

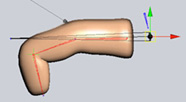
Creamos una cadena de tres huesos, que serán los que controlen la geometría, los centramos bien en el dedo y les damos las inclinaciones correctas.
Los aparcamos y «ceñimos» (bind) el objeto a esta cadena. Construiremos ahora otro sistema de huesos que nos servirá para controlar a estos primeros, y que serán los que animemos.
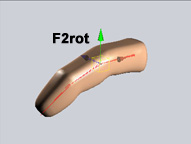
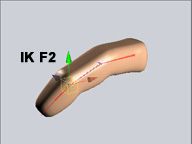
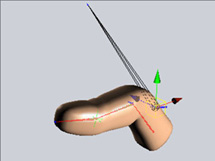
Primero añadimos un hueso pequeño, hijo del de la primera falange, que nazca de su final y corra perpendicular a este hueso. Lo llamamos F2rot. Luego añadimos una IK que controle unicamente el hueso de la segunda falange del dedo, y la hacemos hija de F2rot. Estos son elementos «intermedios», que utilizaremos para relacionar entre si los huesos de geometría con el de Control, que añadimos a continuación:
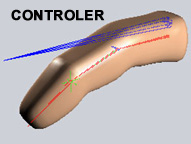
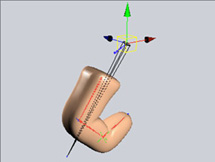
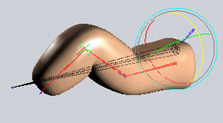
El de Control es un hueso largo que no pertenece a la misma cadena, paralelo al de la primera falange pero un poco desplazado en Y para un mejor manejo del dedo. El último elemento necesario es otro hueso «intermedio», independiente también, que debemos colocar detrás del de Control, apuntando a su comienzo, y con una inclinación lo más parecida posible a la de la tercera falange. La estructura completa quedará de la siguiente forma:
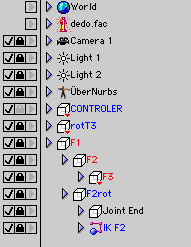
Donde «CONTROLER» es el hueso de Control de todo el dedo, el único que vamos a animar, «rotT3» es el hueso que apunta al comienzo del de control, F1,F2 y F3 son los huesos de las tres falanges, «F2rot» es el hijo transversal de la primera falange, y «IK F2» es la IK que controla la segunda falange.
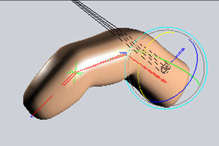
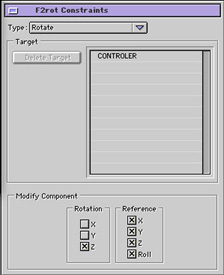
Comenzamos con los constraints de la primera falange, que controlarán la orientación de todo el dedo. Le aplicamos un «rotate» con el CONTROLER como objetivo, desactivándole a continuación el giro en Z, y la referencia a la Z y al roll del target.
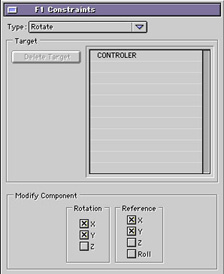
Conseguimos así que el giro del CONTROLER en X y en Y gobierne la dirección en la que apunta todo el dedo. El giro en Z queda libre para otro uso.
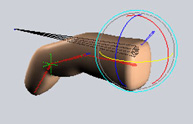
La segunda falange va controlada indirectamente, porque la IK que la gobierna es hija del hueso «F2rot»,, al que le ponemos otro constraint de rotación con el CONTROLER como target, aunque en esta ocasión es precisamente el eje Z el único que dejamos activado:
Lo que conseguimos así es que la rotación en Z del controlador se transmita a la segunda falange, pero convertida en su giro en X:
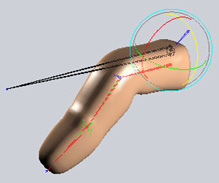
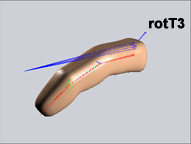
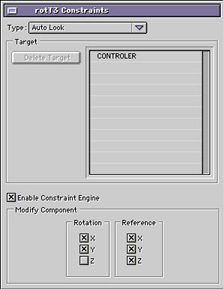
Nos falta ahora la punta del dedo, que podemos gobernar con la traslación del controlador, ya que aún no está siendo utilizada. Para ello hemos creado el hueso «rotT3», al que le aplicaremos un constraint «Auto Look» con el controlador como objetivo, y le desactivaremos la Z para evitar movimientos extraños al animar:
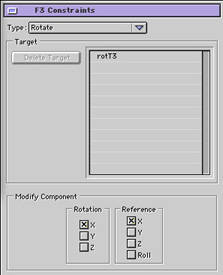
A continuación le aplicamos un constraint «rotate» al hueso de la tercera falange, con el «rotT3» como target, dejando activados solo los ejes X de la relación.
De esta manera, podemos fijar la inclinación de la última falange moviendo en X y en Y el controlador:
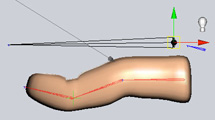
Consiguiendo al final poder mover correctamente todo el dedo con la animación de solo un hueso que lo controla todo, con la consiguiente simplificación del trabajo de animarlo, lo cual revierte en una mejor calidad de la animación.
Vemos como unicamente con el giro y la traslación del CONTROLER podemos conseguir cualquier posición que necesitemos de cada dedo. Al construir de esta forma el controlador del Pulgar, recordad hacerlo con una inclinación adecuada al movimiento necesario para ese dedo especial.
Si habeis seguido hasta aquí todo el proceso, habreis observado que nos queda aún una posibilidad sin cubrir, la de la rotación en Z de todo el dedo. Esta rotación es antinatural, pero a veces es necesaria para ciertas posturas dificiles de la mano (como un puño cerrado), dependiendo del personaje. Con un modelado cuidadoso se puede evitar necesitarlo, pero la verdad es que lo he intentado repetidamente y aún no lo he conseguido…
Y aquí entra la colaboración de la que hablaba al principio: si algún lector tiene la feliz idea de como controlarlo con las herramientas actuales, os estaría muy agradecido si me lo enseñarais, para poder completarlo.
Es algo que nos beneficiará a todos… un saludo y hasta la próxima,Gustavo Muñoz.
Para ver el tutorial desde el sitio de Gustavo, da un click aqui.
Dejar un comentario
¿Quieres unirte a la conversación?Siéntete libre de contribuir!
Si tu comentario no aparece o es borrado, la causa es:
• no tiene nada que ver con el tema - Controles para un dedo – Electric Image Universe• es para promoción
• es para insultar
• es spam
Si necesitas soporte, puedes utilizar los Foros de Ayuda Apple.
Consigue una imagen para tus comentarios en Gravatar.